Householder QR
- Gram-Schmidt, a brief note
- QR factorization via Householder reflections
- Visualizing HQR (optional reading)
- References
A compelling motivation: A natural decomposition for thinking about least squares problems ($Ax = b$) is the QR decomposition of $A$,
\[A = QR,\]where $Q$ is an $m \times m$ unitary matrix (recall: $Q^H Q = \mathrm{I}$ for unitary $Q$) and $R$ is an $m \times n$ upper triangular matrix. For tall-thin matrices ($m \geq n$), it is often beneficial to note the economy (or, thin [Golub and Van Loan], or, reduced [Trefethen and Bau]) QR decomposition as
\[A = QR = Q \begin{bmatrix} R_1 \\ 0 \end{bmatrix} = \begin{bmatrix} Q_1 & Q_2 \end{bmatrix} \begin{bmatrix} R_1 \\ 0 \end{bmatrix} = Q_1 R_1,\]where $R_1$ is an $n \times n$ upper triangular matrix and $0$ is an $(m - n) \times n$ zero matrix, $Q_1$ is an $m \times n$ matrix, and $Q_2$ is $m \times (m - n)$. ($Q_1$ and $Q_2$ have orthogonal columns.)
We can find a solution, $\hat{x}$, to an overdetermined system $Ax = b$ ($m \geq n$) using the QR decomposition as
\[\hat{x} = R_1^{-1} (Q_1^H b).\](Note: We don’t need to explicitly compute $R_1^{-1}$; instead, we can use back substitution to find $\hat{x}$.)
Gram-Schmidt, a brief note
A first course in linear algebra often shows orthogonalization (converting the existing basis of $A$ to an orthonormal basis) using the Gram-Schmidt process. The Gram-Schmidt process orthogonalizes by subtracting off components in the directions of previous columns and then normalizing the remainder to unit length. Simply put,
\[q_j = (\mathrm{I} - P_{j-1}) a_j,\]where $P_{j-1}$ is a projector onto $(q_1, \dotsc, q_{j-1})$.
A critical question to ask here is the following: what happens when $a_j$ is large and lies really close to $P_{j-1}$—aha!—the computation of $q_j$ as shown above is prone to catastrophic cancellation. More concretely, the computed $q_j$ might not be orthogonal to previous $q_j$s.
To overcome this issue of catastrophic cancellation, the modified Gram-Schmidt algorithm is often discussed. However, we will see a different approach of using Householder reflectors to achieve orthogonal triangularizations.
QR factorization via Householder reflections
Reflecting a vector
Before proceeding with Householder QR, let us look at Householder reflections, which are to become an essential part of Householder QR.
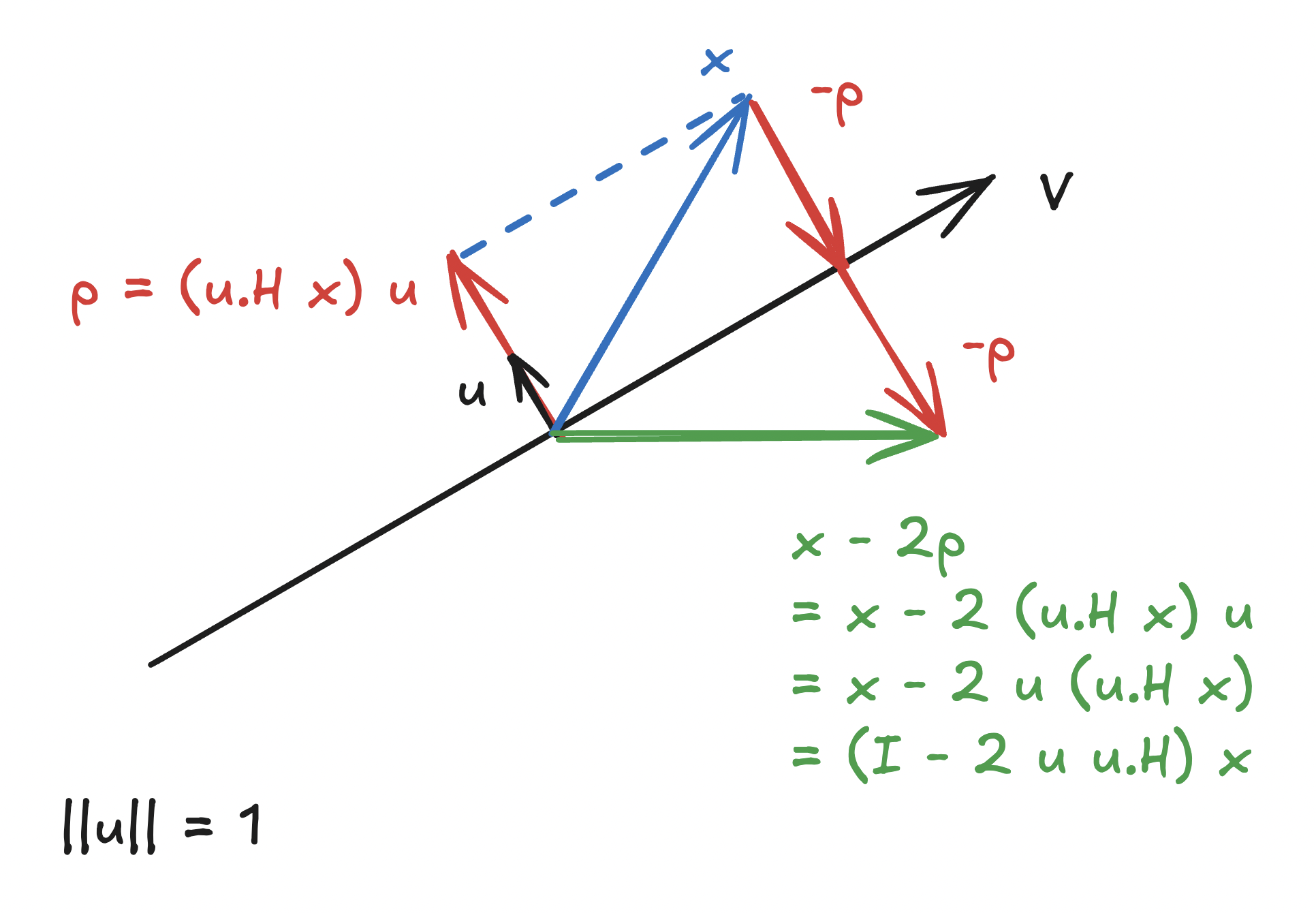
Our goal here will be to come up with a linear transformation that reflects a given vector, $x$, about a subspace, $\mathcal{V}$. Let $u$ be a vector of unit length ($\Vert u \Vert_2 = 1$) orthogonal to subspace $\mathcal{V}$. Then, $H = (\mathrm{I} - 2 u u^H)$ is the transformation that represents reflecting $x$ with respect to the subspace orthogonal to the vector $u$ (= “mirror”).
$H$ is often referred to as the Householder transformation or Householder reflector.
Some observations to note:
-
Any vector $z$ in the subspace $\mathcal{V}$ (= orthogonal to the vector $u$) is left unchanged:
\[Hz = (\mathrm{I} - 2 u u^H) z = z - 2 u (u^H z) = z.\] -
Any vector $x$ can be written as $z + (u^H x) u$, where $z$ is the projection of $x$ onto the subspace $\mathcal{V}$ and $(u^H x) u$ is the projection in the direction of $u$ (orthogonal to $\mathcal{V}$). Now, the reflection is
\[\begin{align*} Hx &= (\mathrm{I} - 2 u u^H)(z + (u^H x) u) \\ &= z + (u^H x) u - 2 u u^H (u^H x) u \\ &= z + (u^H x) u - 2 (u^H x) u (\underbrace{u^H u}_{=\,1}) \\ &= z + (u^H x) u - 2 (u^H x) u \\ &= z - (u^H x) u. \end{align*}\]If the vector $x$ has a component orthogonal to the mirror ($u^H x \neq 0$), then that component is reversed.
-
Finally, observe that reflection is a length-preserving transformation. (Note: $H^HH = HH^H = I$ and $HH = I$: reflecting a reflection results in the original vector.)
Adjusting the mirror
Given two vectors, $x$ and $y$, our goal is to find a mirror (= subspace $\mathcal{V}$) that facilitates reflecting vector $x$ into vector $y$ with $\Vert x \Vert_2 = \Vert y \Vert_2$. Simply put, we need to compute $u$ such that
\[\begin{align*} y = (\mathrm{I} - 2 u u^H) x = x - 2 u u^H x \implies 2 \underbrace{u u^H x}_{=\,p} = x - y, \end{align*}\]where $p$ is the projection of $x$ onto $u$ (see figure in the previous subsection). By construction, $p$ and $u$ must point in the same direction. Hence, $u$ must be a unit vector in that direction:
\[u = \frac{x - y}{\Vert x - y \Vert_2}.\]Now, we have an approach of determining the vector $u$, which defines a subspace that mirrors $x$ into $y$.
Remark on normalization. If $u$ is not a unit vector, the Householder transformation is
\[H = \mathrm{I} - 2 \frac{u}{\Vert u \Vert_2} \frac{u^H}{\Vert u \Vert_2} = \mathrm{I} - 2 \frac{u u^H}{u^H u}.\]Householder vector
Our goal is to convert $A$ to an upper triangular matrix through a series of orthogonal transformations. Here’s a chalkboard animation (as David Bindel would call it!):
\[A = \matrix{\begin{bmatrix} \small{\times} & \small{\times} & \small{\times} \\ \small{\times} & \small{\times} & \small{\times} \\ \small{\times} & \small{\times} & \small{\times} \\ \small{\times} & \small{\times} & \small{\times} \\ \vdots & \vdots & \vdots \\ \small{\times} & \small{\times} & \small{\times} \\ \end{bmatrix} \\[1pt] \phantom{\small{A}}} \xrightarrow{H_1} \matrix{\begin{bmatrix} \color{red}{*} & \small{*} & \small{*} \\ \color{red}{0} & \small{*} & \small{*} \\ \color{red}{0} & \small{*} & \small{*} \\ \color{red}{0} & \small{*} & \small{*} \\ \color{red}{\vdots} & \vdots & \vdots \\ \color{red}{0} & \small{*} & \small{*} \\ \end{bmatrix} \\[1pt] \small{H_1 A}} \xrightarrow{H_2} \matrix{\begin{bmatrix} * & * & * \\ 0 & \color{red}{\star} & \small{\star} \\ 0 & \color{red}{0} & \small{\star} \\ 0 & \color{red}{0} & \small{\star} \\ \vdots & \color{red}{\vdots} & \vdots \\ 0 & \color{red}{0} & \small{\star} \\ \end{bmatrix} \\[1pt] \small{ H_2 H_1 A}} \xrightarrow{H_3} \matrix{\begin{bmatrix} * & * & * \\ 0 & \star & \star \\ 0 & 0 & \color{red}{\small{\bullet}} \\ 0 & 0 & \color{red}{0} \\ \vdots & \vdots & \color{red}{\vdots} \\ 0 & 0 & \color{red}{0} \\ \end{bmatrix} \\[1pt] \small{ H_3 H_2 H_1 A}} = \begin{bmatrix} R_1 \\ 0 \end{bmatrix}\]Let us look at the first step $H_1A$:
\[H_1 A = H_1 \begin{bmatrix} | & | & & | \\ a_1 & a_2 & \dots & a_n \\ | & | & & | \\ \end{bmatrix} = \begin{bmatrix} | & | & & | \\ H_1 a_1 & H_1 a_2 & \dots & H_1 a_n \\ | & | & & | \\ \end{bmatrix},\]where $a_j$ is an $m$-dimensional column of $A$. What we essentially require is a Householder transformation such that $H_1 a_1 = \beta e_1$ for some constant $\beta$, $e_1$ is the first standard basis vector. Since Householder reflectors preserve lengths, we need $\vert \beta \vert = \Vert a_1 \Vert_2$. Hence, we need to find a reflector (= mirror) $H$ that reflects $a_1$ onto the $x$-axis:
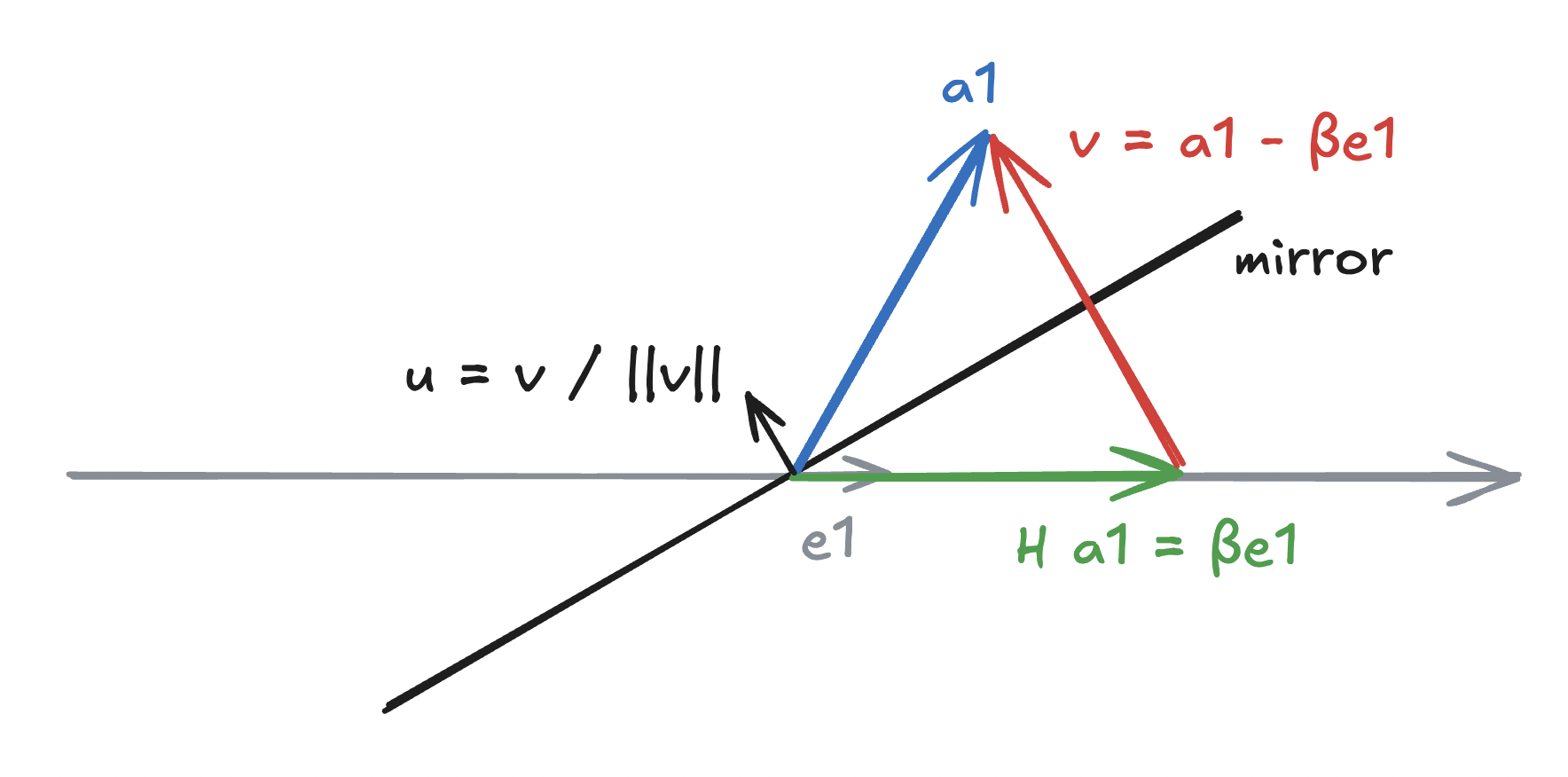
Now, we have $v$ as
\[v = \begin{bmatrix} a_{11} \\ a_{21} \\ \vdots \\ a_{m1} \\ \end{bmatrix} - \begin{bmatrix} \beta \\ 0 \\ \vdots \\ 0 \\ \end{bmatrix}.\]Notice that we have several options to choose $\beta$: $\Vert a_1 \Vert_2$, $- \Vert a_1 \Vert_2$, $z \Vert a_1 \Vert_2$ for some $z \in \mathbb{C}$ with $\vert z \vert = 1$. If we restrict to real-valued $a_1$, we have
\[v = a_1 \mp \Vert a_1 \Vert_2 e_1.\]If we choose $\beta = -\Vert a_1 \Vert_2$, we are consequently placing the mirror as follows:
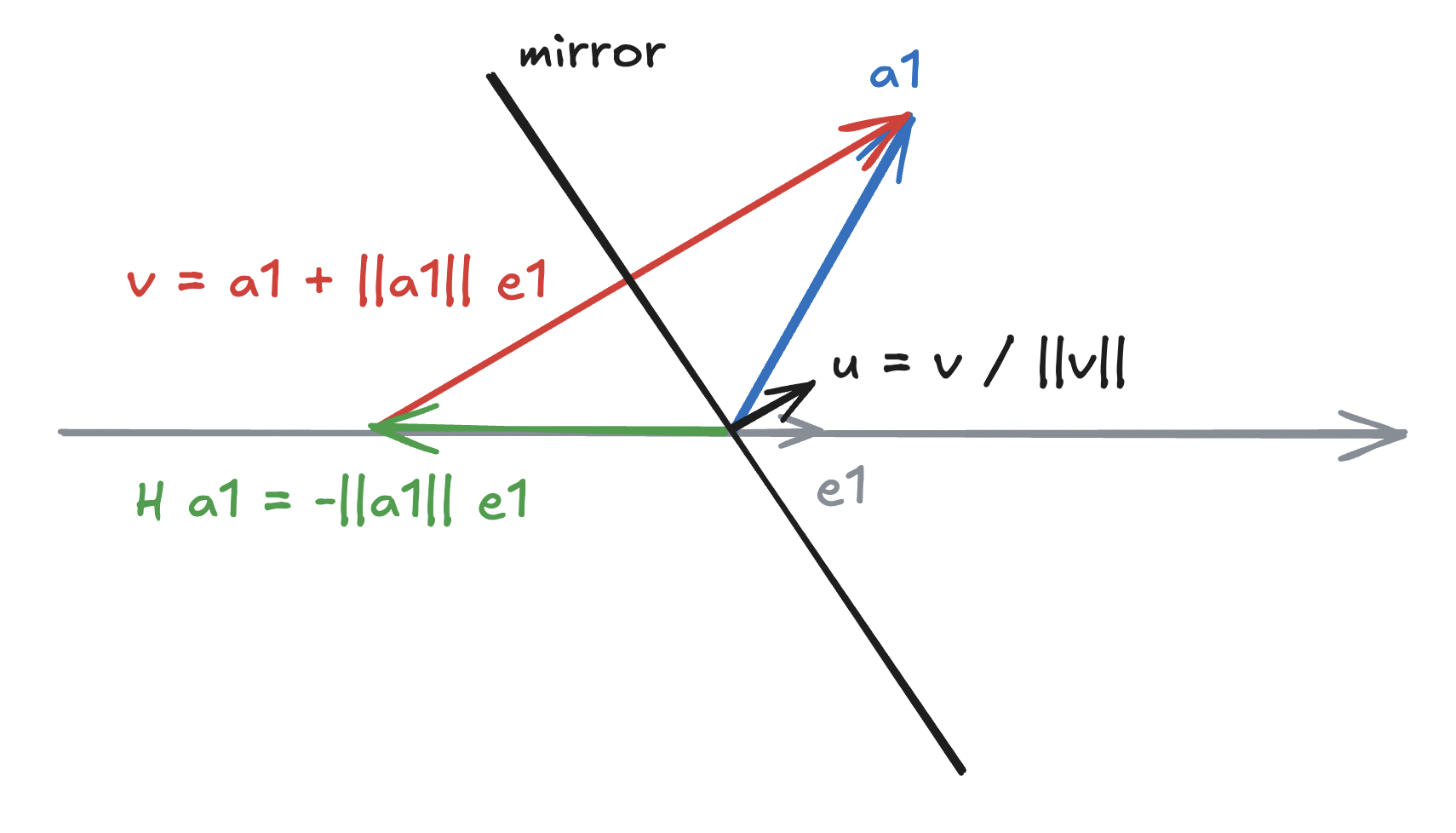
For completeness, we have
\[H_1 a_1 = \left(\mathrm{I} - 2 \frac{vv^H}{\Vert v \Vert^2_2}\right) a_1 = \beta e_1.\]Remark on numerical stability. Observe that the first element of $v$, $v_1 = a_{11} \mp \Vert a_1 \Vert_2$. If $a_{11}$ is positive and $a_{11} \approx \Vert a_1 \Vert_2$ ($a_1$ is really close to $x$-axis), we incur catastrophic cancellation in the computation of $a_{11} - \Vert a_1 \Vert_2$.
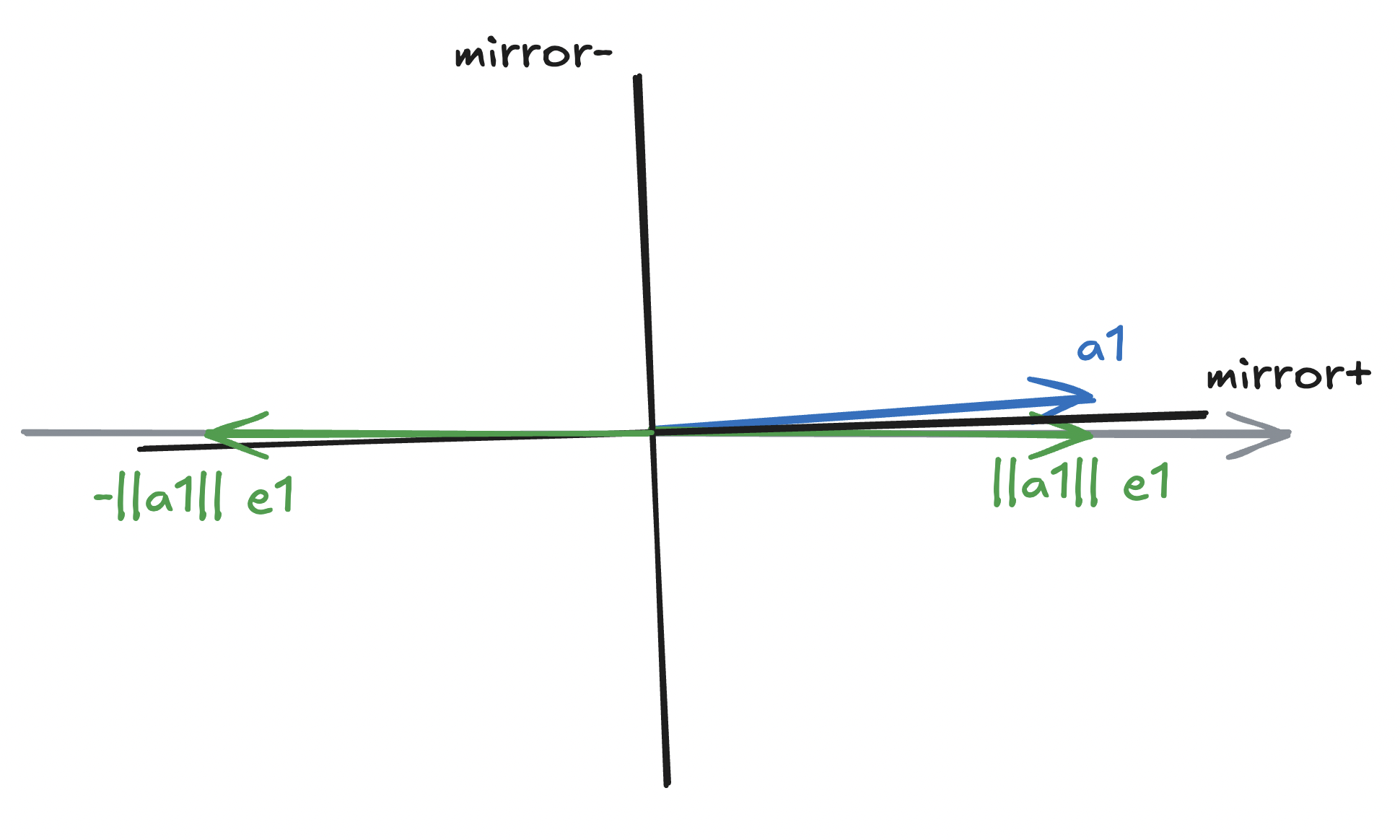
Irrespective of the sign of $a_{11}$, we can avoid catastrophic cancellation by choosing $v = a_1 + \text{sign}(a_{11}) \Vert a_1 \Vert_2 e_1$:
\[v = \begin{bmatrix} a_{11} + \text{sign}(a_{11}) \Vert a_1 \Vert_2 \\ a_{21} \\ \vdots \\ a_{m1} \\ \end{bmatrix}.\]Remark on storing Householder vectors. A simple observation from $H_1 a_1 = \beta e_1$ is that the entries other than the first entry of $H_1 a_1$ are zeros, meaning $(v_2, \dotsc, v_m)$ can be stored as entries of $(H_1 a_1)[2:]$. Additionally, if we can scale $v$ in a way that ensures $v_1 = 1$, we don’t need to explicitly store $v_1$. Hence
\[\tilde{v} = \frac{v}{v_1} = \frac{1}{a_{11} + \text{sign}(a_{11}) \Vert a_1 \Vert_2} \begin{bmatrix} 1 \\ a_{21} \\ \vdots \\ a_{m1} \\ \end{bmatrix}.\](If $v_1 = 0$, we can simply set $\tilde{v}_{j > 1} = 0$.)
from copy import deepcopy
import jaxtyping as jt
import torch
Fl = lambda size: jt.Float[torch.Tensor, size]
sign = lambda x: x and (1, -1)[x < 0]
fl64_randn = lambda size: torch.randn(size, dtype=torch.float64)
fl64_zeros = lambda size: torch.zeros(size, dtype=torch.float64)
def housev_(a1: Fl("m")):
"""
Apply Householder transformation to vector `a1` and store the associated
Householder vector in `a1`.
Note: By convention, `v1 = 1` and `v[2:]` are stored in `a1[2:]`. Also
notice zero-indexing in code, while function definitions and variable
names employ one-indexing.
(Convention: Keeping in line with PyTorch convention `_` at the end of a
function name indicates an inplace operation.)
"""
if len(a1) == 1:
# No need to reflect.
return
a11 = a1[0]
rho11 = -sign(a11) * torch.norm(a1) # stable choice
v1 = a11 - rho11
a1[0] = rho11 # R11 (in A = QR)
a1[1:] /= v1 # inplace op; stores a1[1:] = v[1:], v[0] = 1.0
m = 10
a1 = fl64_randn(m) # random from N(0, 1)
a1_ref = deepcopy(a1) # store to check correctness of H1
housev_(a1) # stores v in a1
v_H1 = torch.cat((torch.tensor(1.0)[None], a1[1:]))
print(f"ṽ={v_H1}")
print(f"R11={a1[0]}")
H1 = torch.eye(m, m) - 2 * torch.outer(v_H1, v_H1) / torch.norm(v_H1)**2
H1_a1 = H1 @ a1_ref
print(f"H1@a1={H1_a1}")
assert torch.allclose(H1_a1[1:], fl64_zeros(m - 1))
assert torch.allclose(H1_a1[0], a1[0])
Householder QR
Now, let us see how to achieve the complete QR transformation (as shown in the chalkboard animation) through a sequence of Householder transformations. In the first iteration, we can block-partition $A$ as:
\[A = \begin{bmatrix} \alpha_{11} & a_{12}^T \\ a_{21} & A_{22} \\ \end{bmatrix}.\]Let the Householder transformation computed from the first column be as follows:
\[\text{housev}\left(\begin{bmatrix}\alpha_{11} \\ a_{21} \end{bmatrix}\right) = \begin{bmatrix} \rho_{11} \\ \tilde{v}_{21} \\ \end{bmatrix},\]where $\rho_{11} = \beta = -\text{sign}(\alpha_{11}) \Vert A[:,1] \Vert_2$.
Now, applying unblocked Householder transformation to $A$ results in
\[\text{hqr}(A) = \left(\mathrm{I} - \frac{2}{1 + \Vert \tilde{v}_{21} \Vert_2^2} \begin{bmatrix}1 \\ \tilde{v}_{21}\end{bmatrix} \begin{bmatrix}1 \\ \tilde{v}_{21}\end{bmatrix}^T\right) \begin{bmatrix} \alpha_{11} & a_{12}^T \\ a_{21} & A_{22} \\ \end{bmatrix} = \begin{bmatrix} \rho_{11} & \color{red}{\small{\times}} \\ 0 & \color{red}{\small{\times}} \\ \end{bmatrix}\]Note that the second column above is the resultant of
\[\left(\underbrace{\mathrm{I} - \frac{2}{1 + \Vert \tilde{v}_{21} \Vert_2^2} \begin{bmatrix}1 \\ \tilde{v}_{21}\end{bmatrix} \begin{bmatrix}1 \\ \tilde{v}_{21}\end{bmatrix}^T}_{H_1}\right) \begin{bmatrix} a_{12}^T \\ A_{22} \\ \end{bmatrix}.\]If we explicitly form $H_1$, we would incur $\mathcal{O}(n^2)$ computations and applying the matrix is $\mathcal{O}(n^3)$. So instead, we will compute it as follows:
\[\begin{bmatrix} a_{12}^T \\ A_{22} \\ \end{bmatrix} - \begin{bmatrix}1 \\ \tilde{v}_{21}\end{bmatrix} \underbrace{\frac{2}{1 + \Vert \tilde{v}_{21} \Vert_2^2} \underbrace{\begin{bmatrix}1 & \tilde{v}_{21}^T \end{bmatrix} \begin{bmatrix} a_{12}^T \\ A_{22} \\ \end{bmatrix}}_{=\,a_{12}^T + \tilde{v}_{21}^T A_{22}}}_{w_{12}^T}.\]Now, we have
\[\text{hqr}(A) = \left(\mathrm{I} - \frac{2}{1 + \Vert \tilde{v}_{21} \Vert_2^2} \begin{bmatrix}1 \\ \tilde{v}_{21}\end{bmatrix} \begin{bmatrix}1 \\ \tilde{v}_{21}\end{bmatrix}^T\right) \begin{bmatrix} \alpha_{11} & a_{12}^T \\ a_{21} & A_{22} \\ \end{bmatrix} = \begin{bmatrix} \rho_{11} & \color{red}{\small{\times}} \\ 0 & \color{red}{\small{\times}} \\ \end{bmatrix} = \begin{bmatrix} \rho_{11} & a_{12}^T - w_{12}^T \\ 0 & A_{22} - \tilde{v}_{21} w_{12}^T \\ \end{bmatrix}.\]Note that in this formulation involves computing $w_{12}^T$ (involving matrix-vector multiplication) and the updated $A_{22}$ (a rank-one update). This is cheaper than forming $H_1$ and performing matrix-matrix multiplication. (We will explicitly analyze the computational cost once we write down the complete algorithm.)
In the next iteration, we proceed with by running Householder transformation on the first column of the updated $A_{22}$. Note that the associated $H_2$ applied to the entire matrix (which ignores first row and column of $A$) is
\[H_2 = \begin{bmatrix} \mathrm{I} & 0 \\ 0 & \mathrm{I} - \dfrac{2}{1 + \Vert \tilde{v}_{21} \Vert_2^2} \begin{bmatrix}1 \\ \tilde{v}_{21}\end{bmatrix} \begin{bmatrix}1 \\ \tilde{v}_{21}\end{bmatrix}^T \end{bmatrix}.\]import numpy as np
def housev_(A22: Fl("m n")):
"""Apply Householder transformation to the first column of A22."""
if len(A22[:, 0]) == 1:
# No need to reflect anything.
# NOTE: If this is ignored, the sign for the last entry will be flipped,
# and the resultant `Q` will not be orthogonal.
return
alpha11 = A22[0, 0]
a21 = A22[1:, 0]
rho11 = -sign(alpha11) * torch.norm(A22[:, 0])
v1 = alpha11 - rho11
A22[0, 0] = rho11
a21 /= v1
def hqr_(A: Fl("m n")):
"""
Transform `A` to upper triangular using Householder QR.
Note: The elements below the diagonal store the vectors associated with
the respective Householder transformation.
"""
A22 = A
while A22.shape[1] > 0:
# A22: (m - k + 1, n - k + 1) at iter k = {1, ..., n}.
housev_(A22)
a12_tr = A22[0, 1:][None] # (1, n - k)
a21 = A22[1:, 0][:, None] # (m - k, 1)
A22 = A22[1:, 1:] # (m - k, n - k)
# w12_tr: (1, n - k)
w12_tr = (2 / (1 + torch.norm(a21) ** 2)) * (a12_tr + a21.T @ A22)
a12_tr -= w12_tr
A22 -= a21 @ w12_tr
# Compare with standard numpy implementation: `np.linalg.qr`.
m, n = 5, 3
A = fl64_randn([m, n])
A_ref = deepcopy(A)
hqr_(A)
R_np = np.linalg.qr(A_ref, "reduced").R
assert torch.allclose(torch.triu(A)[:n], torch.from_numpy(R_np))
Remark on computational complexity. For the above algorithm, bulk of the computation goes in computing $w_{12}^T$ and updating $A_{22}$. Computing $a_{21}^T A_{22}$ and $a_{21} w_{12}^T$ cost $\mathcal{O}((m - k)(n - k))$. Since $k$ runs through all the columns of $A$, the cost is approximately $\sum_{k=1}^{n} ((m - k)(n - k))$—simplifying this gives us the cost of the algorithm to be $\mathcal{O}(mn^2)$.
Forming $\boldsymbol{Q}$
Running a full iteration of Householder QR on an $m \times n$ matrix $A$ results in
\[H_n \dots H_2 H_1 A = R,\]where $R$ is upper trapezoidal and $H_j$ is a unitary Householder transformation (almost: note that the top-left corner is a $j-1 \times j-1$ identity matrix). Further, we know that $H_j^{-1} = H_j$. Hence, we have
\[A = \underbrace{H_1 H_2 \dots H_n}_{Q} R.\]Note that the above algorithm doesn’t explicitly form $Q^T = H_n \dots H_1$ (or, $Q = H_1 \dots H_n$), and as long as we have efficient routines to perform BLAS operations using the Householder vectors, we won’t need to explicitly form $Q$ or $Q^T$. However, in few specific cases we may need to explicitly form $Q$ (e.g., for forward error analysis), and we’ll now see how to do so.
Observe that if we now apply our Householder transformations on to the (padded) identity matrix in reverse, we have
\[H_1 H_2 \dots H_n \begin{bmatrix} \mathrm{I}_{n \times n} \\ 0_{m - n \times n} \end{bmatrix} = Q.\]Let us consider the first step of applying $H_n$. Note that for an $m \times n$ matrix $A$, $H_n$ only modifies $A[n:, n:]$ entries. As an example, consider a $5 \times 3$ $A$ and let’s see how $H_3$ applies:
\[\begin{align*} H_3 \begin{bmatrix} \mathrm{I}_{3 \times 3} \\ 0_{2 \times 3} \end{bmatrix} &= \begin{bmatrix} \mathrm{I}_{2 \times 2} & 0 \\ 0 & \mathrm{I} - \dfrac{2}{1 + \Vert \tilde{v}_{21} \Vert_2^2} \begin{bmatrix}1 \\ \tilde{v}_{21}\end{bmatrix} \begin{bmatrix}1 \\ \tilde{v}_{21}\end{bmatrix}^T \end{bmatrix} \begin{bmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & \color{red}{1} \\ 0 & 0 & \color{red}{0} \\ 0 & 0 & \color{red}{0} \\ \end{bmatrix} \\ &= \left( \mathrm{I} - \frac{2}{1 + \Vert \tilde{v}_{21} \Vert_2^2} \begin{bmatrix}1 \\ \tilde{v}_{21}\end{bmatrix} \begin{bmatrix}1 \\ \tilde{v}_{21}\end{bmatrix}^T \right) \begin{bmatrix} 1 \\ 0_{2 \times 1} \end{bmatrix} \\ &= \begin{bmatrix} 1 \\ 0_{2 \times 1} \end{bmatrix} - \frac{2}{1 + \Vert \tilde{v}_{21} \Vert_2^2} \begin{bmatrix}1 \\ \tilde{v}_{21}\end{bmatrix} \left( \begin{bmatrix}1 & \tilde{v}_{21}^T\end{bmatrix} \begin{bmatrix} 1 \\ 0_{2 \times 1} \end{bmatrix} \right) \\ &= \begin{bmatrix} 1 - \dfrac{2}{1 + \Vert \tilde{v}_{21} \Vert_2^2} \\ -\tilde{v}_{21} \dfrac{2}{1 + \Vert \tilde{v}_{21} \Vert_2^2} \end{bmatrix}. \end{align*}\]Next, let’s apply $H_2$:
\[\begin{align*} H_2 \begin{bmatrix} 1 & 0 & 0 \\ 0 & \color{red}{1} & \color{red}{0} \\ 0 & \color{red}{0} & \color{red}{\small{\times}} \\ 0 & \color{red}{0} & \color{red}{\small{\times}} \\ 0 & \color{red}{0} & \color{red}{\small{\times}} \\ \end{bmatrix} &= \left( \mathrm{I} - \frac{2}{1 + \Vert \tilde{v}_{21} \Vert_2^2} \begin{bmatrix}1 \\ \tilde{v}_{21}\end{bmatrix} \begin{bmatrix}1 \\ \tilde{v}_{21}\end{bmatrix}^T \right) \begin{bmatrix} 1 & 0 \\ 0_{3 \times 1} & A_{22} \\ \end{bmatrix} \\ &= \begin{bmatrix} 1 & 0 \\ 0_{3 \times 1} & A_{22} \\ \end{bmatrix} - \frac{2}{1 + \Vert \tilde{v}_{21}\Vert_2^2} \begin{bmatrix}1 \\ \tilde{v}_{21}\end{bmatrix} \left( \begin{bmatrix}1 & \tilde{v}_{21}^T\end{bmatrix} \begin{bmatrix} 1 & 0 \\ 0_{3 \times 1} & A_{22} \\ \end{bmatrix} \right) \\ &= \begin{bmatrix} 1 & 0 \\ 0_{3 \times 1} & A_{22} \\ \end{bmatrix} - \frac{2}{1 + \Vert \tilde{v}_{21}\Vert_2^2} \begin{bmatrix} 1 & \tilde{v}_{21}^T A_{22} \\ \tilde{v}_{21} & \tilde{v}_{21} \tilde{v}_{21}^T A_{22} \\ \end{bmatrix} \\ &= \begin{bmatrix} 1 - \dfrac{2}{1 + \Vert \tilde{v}_{21} \Vert_2^2} & -\color{green}{ \tilde{v}_{21}^T A_{22} \dfrac{2}{1 + \Vert \tilde{v}_{21} \Vert_2^2} } \\ -\tilde{v}_{21} \dfrac{2}{1 + \Vert \tilde{v}_{21} \Vert_2^2} & A_{22} - \tilde{v}_{21} \color{green}{ \tilde{v}_{21}^T A_{22} \dfrac{2}{1 + \Vert \tilde{v}_{21} \Vert_2^2} } \\ \end{bmatrix}. \end{align*}\]Hence, we can proceed by updating a block of $A$ (inplace) as
\[\begin{align*} Q\left(\begin{bmatrix} \alpha_{11} & a_{12}^T \\ a_{21} = \tilde{v}_{21} & A_{22} \end{bmatrix}\right): \\ \alpha_{11} &\leftarrow 1 - \frac{2}{1 + \Vert \tilde{v}_{21} \Vert_2^2}, \\ a_{12}^T &\leftarrow -a_{21}^T A_{22} \frac{2}{1 + \Vert \tilde{v}_{21} \Vert_2^2}, \\ A_{22} &\leftarrow A_{22} + a_{21} a_{12}^T, \\ a_{21} &\leftarrow -a_{21} \frac{2}{1 + \Vert \tilde{v}_{21} \Vert_2^2}. \\ \end{align*}\]def Q_(A: Fl("m n")):
"""Forms `Q` from Householder vectors stored below the diagonal in `A`."""
m, n = A.shape
for k in range(n - 1, -1, -1):
if k + 1 >= m:
# The last entry in a square matrix.
A[k, k] = 1.0
continue
a21 = A[k + 1 :, k][:, None] # (m - k - 1, 1)
tau = 2 / (1 + torch.norm(a21) ** 2)
A[k, k] = 1 - tau # alpha_11
if k + 1 < n:
A22 = A[k + 1 :, k + 1 :] # (m - k - 1, n - k - 1)
a12_tr = tau * (-a21.T @ A22)
A22 += a21 @ a12_tr # inplace
A[k, k + 1 :][None] = a12_tr # write inplace
a21 *= -tau
# Compare with standard numpy implementation: `np.linalg.qr`.
m, n = 5, 3
A = fl64_randn([m, n])
A_ref = deepcopy(A)
hqr_(A)
Q_(A)
Q_np = np.linalg.qr(A_ref, "reduced").Q
assert torch.allclose(A, torch.from_numpy(Q_np))
# Also verify that Q.T@Q is identity (orthogonality check).
assert torch.allclose(torch.eye(n, dtype=torch.float64), A.T @ A)
Visualizing HQR (optional reading)
This blog post was heavily inspired by me wanting to recreate the animation from Gabriel Peyré’s tweet (or, “x”?) on unitary triangulation of a nonsymmetric matrix and partly from wanting David Bindel’s chalkboard animation to come alive!
For the purposes of this animation, we will be using a terribly inefficient way of forming $Q$. Observe that our approach of forming $Q$ in reverse requires us to have completed a (forward) run of the Householder QR; however, for the purpose of this animation, we want to show gradual change in $Q$ (as $R$ changes). To that end, we will update $Q$ at every iteration as
\[Q_j = Q_{j-1} H_j.\]def housev(A22: Fl("m n")) -> [float, float]:
"""Out-of-place Householder transformation to the first column of A22."""
if len(A22[:, 0]) == 1:
return A22[0, 0], 1.0
alpha11 = A22[0, 0]
a21 = A22[1:, 0]
rho11 = -sign(alpha11) * torch.norm(A22[:, 0])
v1 = alpha11 - rho11
return rho11, v1
def hqr(A: Fl("m n")) -> [Fl("m n"), Fl("n n")]:
"""Out-of-place Householder QR (forms Q explicitly)."""
m, n = A.shape
Q = torch.eye(m, dtype=A.dtype)
R = deepcopy(A)
R22 = R
for k in range(n):
rho11, v1 = housev(R22)
v21 = R22[1:, 0] / v1
R22[0, 0] = rho11
R22[1:, 0] = torch.zeros_like(R22[1:, 0])
v = torch.cat((torch.tensor([1.0]), v21))[:, None]
H = torch.eye(m, dtype=A.dtype)
H[k:, k:] -= 2 * (v @ v.T) / (v.T @ v)
Q = Q @ H
v21 = v21[:, None]
r12_tr = R22[0, 1:][None]
R22 = R22[1:, 1:]
w12_tr = (2 / (1 + torch.norm(v21) ** 2)) * (r12_tr + v21.T @ R22)
r12_tr -= w12_tr
R22 -= v21 @ w12_tr
return Q[:, :n], R[:n]
# Compare with standard numpy implementation: `np.linalg.qr`.
m, n = 5, 3
A = fl64_randn([m, n])
Q, R = hqr(A)
QR_np = np.linalg.qr(A, "reduced")
assert torch.allclose(Q, torch.from_numpy(QR_np.Q))
assert torch.allclose(R, torch.from_numpy(QR_np.R))
Now, let’s finally animate Householder QR:
from functools import partial
import matplotlib.cm as cm
import matplotlib.colors as colors
import matplotlib.pyplot as plt
import seaborn as sns
from celluloid import Camera
plt.rcParams.update({"font.size": 14})
plt.rc("text", usetex=True)
plt.rc("text.latex", preamble=r"\usepackage{amsmath} \usepackage{amssymb}")
def plt_mat(
A: Fl("m n"),
ax: plt.Axes,
cmap: colors.LinearSegmentedColormap,
norm: colors.TwoSlopeNorm,
label: str = None,
):
"""Plot matrix `A` on the given axis `ax`."""
A_hmap = sns.heatmap(
A,
ax=ax,
cmap=cmap,
norm=norm,
xticklabels=[],
yticklabels=[],
cbar=False,
square=(A.shape[0] == A.shape[1]),
)
A_hmap.axhline(y=0, color="k")
A_hmap.axhline(y=A.shape[1], color="k")
A_hmap.axvline(x=0, color="k")
A_hmap.axvline(x=A.shape[0], color="k")
if label is not None:
ax.text(A.shape[0] / 2, A.shape[1] + A.shape[1] / 10, label)
def hqr_anim(A: Fl("m n")):
"""Animate Householder QR."""
# Setup fig, axes for animation.
gridspec = dict(wspace=0, width_ratios=[1.2, 1, 1])
fig, axs = plt.subplots(
nrows=1, ncols=3, figsize=(12, 4), gridspec_kw=gridspec
)
camera = Camera(fig)
# Setup cmap and normalization to ensure 0.0 is always mapped to white.
norm = colors.TwoSlopeNorm(vmin=-1, vcenter=0, vmax=1)
cmap = cm.RdBu
_plt_mat = partial(plt_mat, cmap=cmap, norm=norm)
m, n = A.shape
Q = torch.eye(m, dtype=A.dtype)
R = deepcopy(A)
# Plot `A`, add "=", as in "A = " part.
_plt_mat(A, ax=axs[0], label=r"$\boldsymbol{A}$")
equals_pos = (A.shape[0] + A.shape[0] / 12, (A.shape[1] + A.shape[1] / 10) / 2)
axs[0].text(equals_pos[0], equals_pos[1], r"$\boldsymbol{=}$")
# Plot initial `Q` (= identity) and `R` (= `A`).
_plt_mat(Q, ax=axs[1], label=r"$\boldsymbol{Q}$")
_plt_mat(R, ax=axs[2], label=r"$\boldsymbol{R}$")
# Run Householder QR, explicity forming `Q` at each step and zeroing out the
# below diagonal elements of `R`.
R22 = R
for k in range(n):
rho11, v1 = housev(R22)
v21 = R22[1:, 0] / v1
R22[0, 0] = rho11
R22[1:, 0] = torch.zeros_like(R22[1:, 0])
v = torch.cat((torch.tensor([1.0]), v21))[:, None]
H = torch.eye(m, dtype=A.dtype)
H[k:, k:] -= 2 * (v @ v.T) / (v.T @ v)
Q = Q @ H
v21 = v21[:, None]
r12_tr = R22[0, 1:][None]
R22 = R22[1:, 1:]
w12_tr = (2 / (1 + torch.norm(v21) ** 2)) * (r12_tr + v21.T @ R22)
r12_tr -= w12_tr
R22 -= v21 @ w12_tr
# Plot `A` to the left.
_plt_mat(A, ax=axs[0], label=r"$\boldsymbol{A}$")
axs[0].text(equals_pos[0], equals_pos[1], r"$\boldsymbol{=}$")
# Plot the updated `Q` and `R` to the right.
_plt_mat(Q, ax=axs[1], label=r"$\boldsymbol{Q}$")
_plt_mat(R, ax=axs[2], label=r"$\boldsymbol{R}$")
camera.snap()
# Verify that the obtained QR factorization is as expected.
Q = Q[:, :n]
assert torch.allclose(Q.T @ Q, torch.eye(n, dtype=A.dtype))
assert torch.allclose(A, Q @ torch.triu(R)[:n])
plt.tight_layout()
anim = camera.animate()
return anim
# Let us run the animation for a (100, 100) random matrix.
m, n = 100, 100
A = fl64_randn([m, n])
anim = hqr_anim(A)
anim.save("./hqr_anim.gif", dpi=200, writer="pillow")
References
- David Bindel. Householder transformations. (Accessed 09/22/2024.)
- Robert van de Geijn, Margaret Myers. Householder QR Factorization. Advanced Linear Algebra: Foundations to Frontiers.
- householder reflectors
- QR
- matrix factorization